- CSCD核心中文核心科技核心
- RCCSE(A+)公路运输高质量期刊T1
- Ei CompendexScopusWJCI
- EBSCOPж(AJ)JST

 “SP-MAPS”系统,通过投影映射直观显示开挖爆破后的超欠挖状况,从而提高山岭隧道工程的施工安全和效率。目前该系统已应用在清水建设承建的2 条隧道工程中。
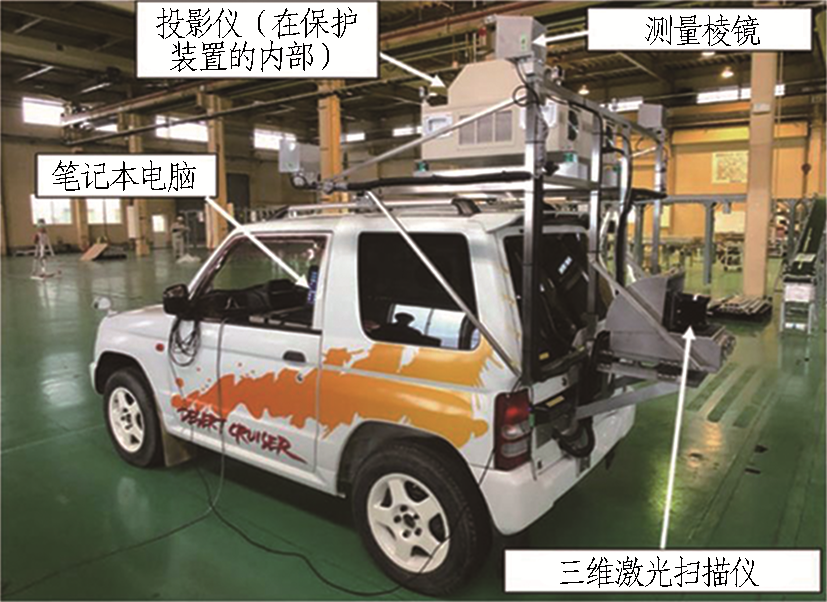
“SP-MAPS”系统,通过投影映射直观显示开挖爆破后的超欠挖状况,从而提高山岭隧道工程的施工安全和效率。目前该系统已应用在清水建设承建的2 条隧道工程中。“SP-MAPS”系统如图1 所示,由三维激光扫描仪、投影设备、用于测量的棱镜、笔记本电脑和全站仪组成。基于三维激光扫描仪测量的开挖面形状与设计形状对比结果,自动形成超欠挖量的映射图像,并直接投射至开挖面,使机械操作人员更加精准掌握需要进行欠挖处理的位置以及欠挖量。
为了减少设备安装和拆卸时间,除测量设备外的其他设备统一安装在车辆上。使用时,车辆配置在开挖面附近,通过操作笔记本电脑,系统自动执行一系列流程,包括棱镜测量、通过三维激光扫描仪获得开挖面的形状数据、根据形状数据分析创建和显示超欠挖图像,并使用投影设备投影图像等。自棱镜测量到图像投影所需的时间约为50 s,而在不更改车辆位置的情况下更新投影图像时,仅需约30 s 即可完成更新。
使用本系统时,机械操作人员可以直接从投射在开挖面上的图像连续观察到超欠挖量,能够提高欠挖处理效率。此外,由于减少了开挖后无支护暴露时间,有助于快速保证隧道的稳定性。在富山县南砺市的真木隧道工程中,确认了该系统与传统方法相比可减少32%的欠挖处理时间。
